原创 《国家科学评论》 中国科学杂志社 2022-12-06 14:30 发表于北京
利用屈曲力诱导的方法,可以实现三维细观结构的精准组装。这种技术能够跨尺度兼容多种材料,在微机器人、微电子器件加工等领域都有应用前景。
中国科学技术大学李家文、吴东课题组利用飞秒激光切割出二维细观结构,并通过紫外光在细观结构上固化出具有特定磁链方向的编码磁性层,最终通过屈曲力诱导的方式制备出可磁响应的三维细观结构(METM),具有在静态磁场下的高阶变形和交变磁场下的高频驱动的特性。该成果以“Magnetically encoded 3D mesostructure with high-order shape morphing and high-frequency actuation”为题发表于《国家科学评论》(National Science Review, NSR)。中国科学技术大学博士后李瑞和硕士生张聪为论文的共同第一作者,李家文副教授和吴东教授为论文通讯作者。
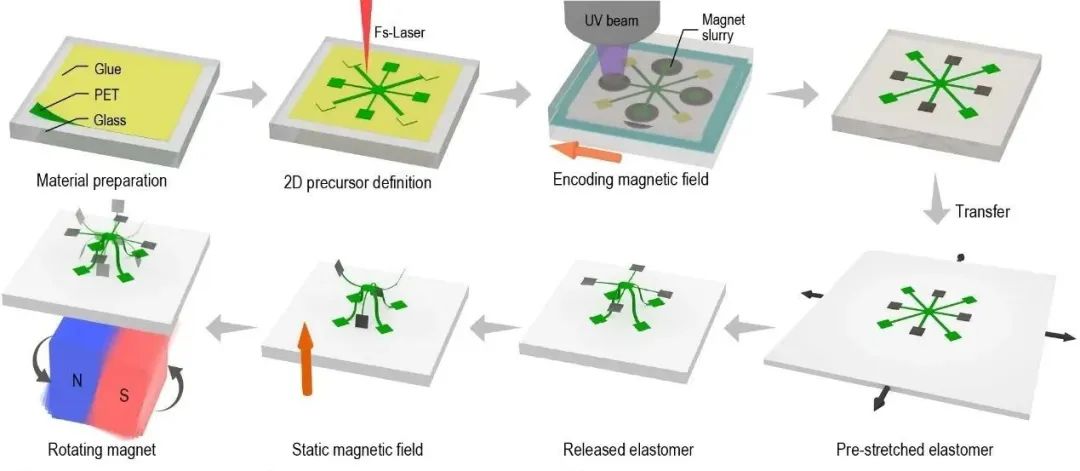 三维细观致动器的制备流程示意图
三维细观致动器的制备流程示意图
METM的具体特性包括:
(一)高阶变形。磁编码技术确保了METM结构上的磁链分布可沿任意三维方向,结合飞秒激光微加工的灵活性,可实现多种构型的三维细观结构的多自由度变形,例如在静态磁场下的弯曲、扭转以及混合变形模式。
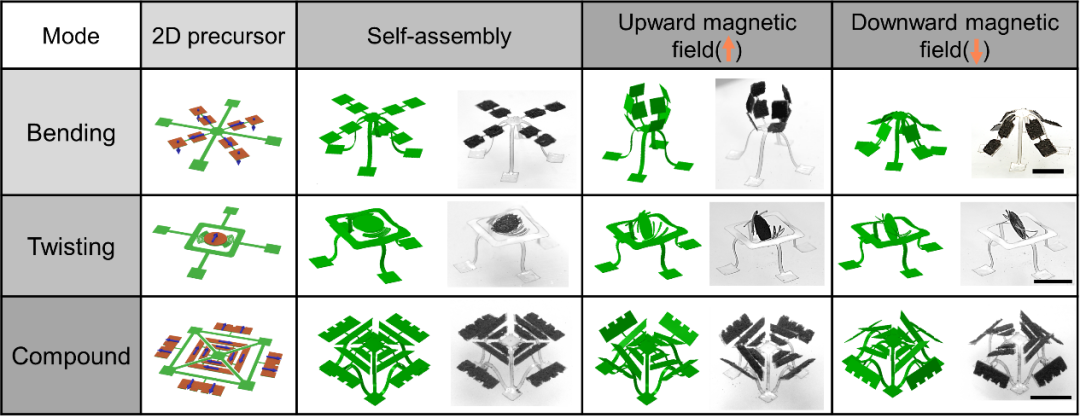
三维细观结构的高阶变形
(二)高频驱动。METM的骨架由聚乙烯对苯二甲酸脂(PET)构成,具有合适的弹性模量(~3 GPa)。METM的磁性悬臂可在外部旋转磁场的驱动下发生高频率(~55 Hz)大变形(~66.8%)振动。
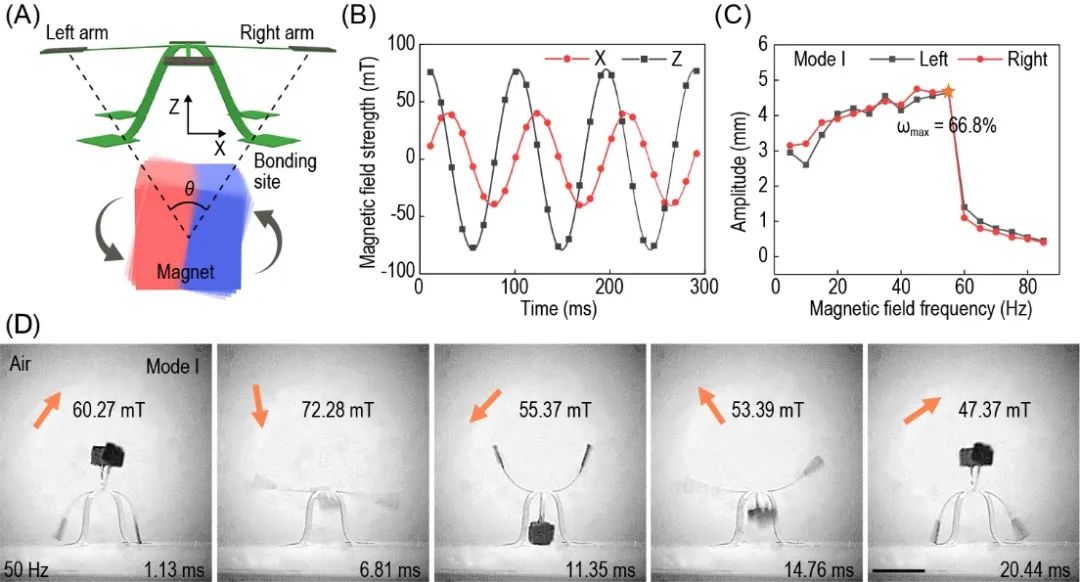
METM的高频驱动。(a)METM在旋转磁场下的高频驱动;(b)旋转磁场的X向和Z向分量;(c)METM悬臂的振幅与频率间的关系;(d)METM在空气中的高频驱动延时图。
(三)可应用于多个场合。METM可轻松转移到多种基底和多种环境中,从而在微电子器件、微流控和机器人等方面具有重要应用前景。视频展示的一个仿生机器人在旋转磁场的驱动下翅膀快速煽动,在水槽中快速向前运动。
文章最后指出,随着材料科学和磁编码技术的发展,可以将METM进一步小型化和多功能化,探究其在生物医学和生物传感等方面的应用。
了解详情请读原文▼
[点击下方链接或阅读原文]
https://doi.org/10.1093/nsr/nwac163