自然界中,生物可以通过形状切换来适应复杂的生存环境。近年来,赋予机器人可控的形状切换能力已成为机器人领域的研究热点,然而,受限于传统的材料与加工技术,如何使微机器人集成变形能力仍是个挑战。
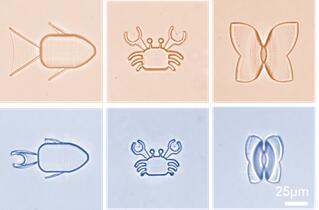
近日,中国科学技术大学微纳米工程实验室的吴东教授、李家文副教授与香港中文大学机械工程系张立教授合作在pH刺激响应水凝胶中开发出具有环境响应变形功能的微机器人,并将其应用于癌细胞精准治疗。研究团队利用飞秒激光灵活调控响应水凝胶的膨胀率,任意编程出各种形状可调的微机器人,如微鱼、微螃蟹和微蝴蝶等(图1)。
更进一步,赋予微机器人磁响应特性,在外界磁场下,微鱼机器人可以在人造血管网络中精确导航,并在目标区域打开鱼嘴完成药物释放,最终实现癌细胞精准治疗(图2)。
目前,该微机器人仍存在许多问题需要改进,包括更小的尺寸、合适的体内追踪模式、无害化的回收方式等。研究人员也将围绕上述问题继续深入研究,争取使其早日进入临床试验阶段。
工程科学学院微纳米工程实验室博士后辛晨为文章第一作者,吴东教授、李家文副教授和香港中文大学张立教授为论文的通讯作者。这项工作得到中国科学院、国家自然科学基金和中国博士后科学基金等项目的资助。
该成果以“Environmentally Adaptive Shape-Morphing Microrobots for Localized Cancer Cell Treatment”为题发表在国际知名期刊ACS Nano 2021, 15, 11, 18048–18059 上。相关成果被美国化学学会重点报道,YouTube、B站等国内外网站播放30万余次。
相关链接:
https://pubs.acs.org/doi/10.1021/acsnano.1c06651
https://www.youtube.com/watch?v=-QxioOUyFLg&t=45s